関節ロボットによる鋳造部品の機械的バリ取り
送り出しユニットと第7ロボット軸としてWEISSロータリーインデックスリングを使用します
概要
- 産業用ロボットとロータリーインデックステーブルを組合わせた自動バリ取りソリューション
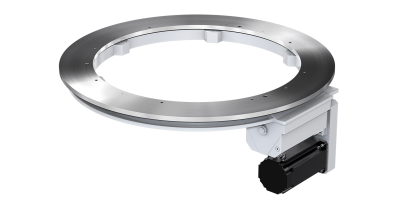
- WEISS NR 2200ロータリーインデックスリングが送り出しユニットとツールホルダーの機能を果たします
- ロボットの第7軸として、ロータリーインデックスリングはロボット製造者のモータで制御されます

課題
スイスのヴェッツィコーンのUnimecは、 鉄道車両のギアボックスハウジングやスタブ車軸などを生産しています。体力を消耗する手作業によるバリ取りに代わり、フレキシブルな関節ロボットを使用した自動化ソリューションが必要とされていました。フレキシブルで、精密な、パワフルかつ安全なワークの送り出し方法が必要でした。
解決策
WEISS NR 2200ロータリーインデックスリングが、バリ取りシステムの基礎を構成しています。このリングには、最大8個のワークとツールホルダーを載せることができます。ロータリーテーブルでワークを産業用ロボットへ送り出し、交換可能なツールで加工します。複雑な形状のバリを取るために、ロボットはリングに対して平行に移動し、リング自体も最大20°まで回転することができます。ロボットの第7軸としてNR2200を駆動します。